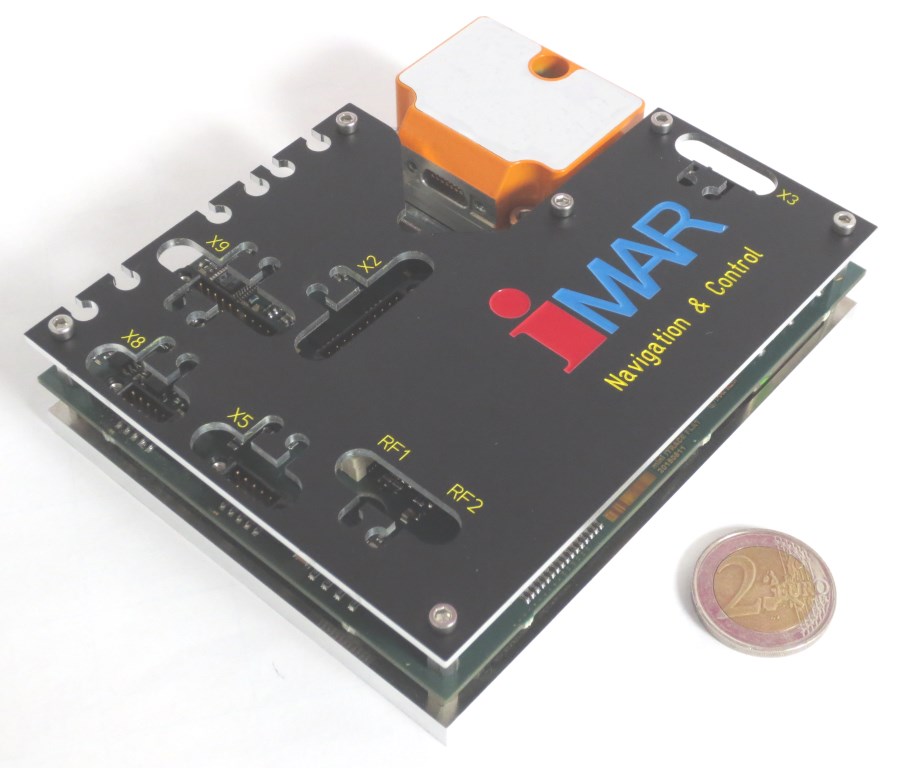
iNAT-M200-FLAT Miniature MEMS Based Navigation, Surveying & Control System (500 Hz)
Low Weight Small Size MEMS Based INS/GNSS
iNAT-M200-FLAT is a light weight small-size accurate MEMS based INS of class 0.5...10 deg/hr (AllanVariance bias stability), consisting of 3 robust MEMS gyro axes and 3 MEMS accelerometer axes, integrated GNSS Receiver (GPS, GLONASS, GALILEO, BEIDOU; L1L2 RTK), wheel sensor interface and an advanced 42+ state Kalman filter based INS/GNSS loosely or tightly or deeply coupled data fusion.
The system can be delivered with enclosure or as an OEM Version without any enclosure.
The iNAT series is used for navigation, guidance and control of vehicles, stabilization of platforms, surveying reference as ground truth etc. in the fields of industrial, automotive, surveying, defense and space applications. The full accuracy range of the members of the iNAT family from economic to high-end can be found here:
Link to the entire iNAT system family
Features
- Applications: GNSS aided navigation (air, land, sea, subsea), attitude heading reference (AHRS), surveying, UAV, AUV and RPV guidance & control etc.
- Real-time data output: longitude, latitude, alttude / height, velocity, roll, pitch, yaw / heading, angular rates, acceleration, status, calibrated raw data INS/GNSS (for post-processing)
- Interfaces: RS422 (UART) interfaces, CANaero / ARINC825 / CAN, Ethernet (TCP/IP and UDP), SYNC-I/Os
- Data output rate up to 500 Hz (each data log separately adjustable)
- Minimum latency and minimum jitter on data output
- 4 classes of integrated GNSS engines available:
- iNAT-M200/TLx: high performance class GNSS engine, all frequency / all constellation RTK, dual-antenna support; GPS, GALILEO, GONASS, BEIDOU etc.
- iNAT-M200/SLx: performance class GNSS engine, up to all frequency / all constellation RTK, dual-antenna support as option; up to GPS, GALILEO, GONASS, BEIDOU etc.
- iNAT-M200/RLx: commercial class GNSS engine, multi frequency / multi constellation RTK, dual-antenna; GPS, GALILEO, GONASS, BEIDOU etc.
- iNAT-M200/MLx: economic class L1 GNSS engine, no RTK; only up to three of GPS, GALILEO, GLONASS, BEIDOU at the same time
- Support of dual-antenna GNSS based heading for applications with mainly very low velocity profile (this optional feature is typically not required for standard vehicle dynamics)
- integrated multi-constellation / multi frequencies GNSS receiver; dual antenna heading supported as option
- designd to operate also in GNSS denied, spoofing and jamming environment
- Measurement range:
iNAT-M200-FLAT/x~N: +/-400 deg/s, +/-10 g (option: +/- 30 g) - Inertial Sensor Performance:
Heading accuracy:
iNAT-M200-FLAT/x~N: 0.1 deg (GNSS aided)
Attitude accuracy:
iNAT-M200-FLAT/x~N: < 0.03 deg (GNSS aided)
Position accuracy GNSS-L1L2 aided < 2 m (rms) [S/A off]
Position accuracy GNSS aided 0.02 m (rms) [RTK available and sufficient GNSS conditions]
Noise / ARW:
iNAT-M200-FLAT/S~N: 0.2 deg/sqrt(hr) / 200 µg/sqrt(Hz) (10 g Version)
Bias stability (AV):
iNAT-M200-FLAT/S~N: < 0.5 °/hr, 0.3 mg @ const. temp. (10 g Version)
- Integrated 42+ state tightly or loosley or deeply coupled data fusion
- Internally up to 32 GByte non-volatile memory for data storage
- Connectors: housed version with LEMOSA EGG/EGJ and SMA
- Power Supply: 9...34 V DC, 7.5 W
- enclosed version and OEM Version (without enclosure) available
- Weight: approx. 320 grams (OEM Version, w/o housing)
- ESD protection, overvoltage protection
- Modular system architecture: customized applications can be integrated by iMAR easily (please contact our sales engineers for details and the SDK). So the iNAT can provide arbitrary data and command protocols according to customer requirement, e.g. to substitute other navigation systems by iNAT (e.g. for Form-Fit-Function replacements).
- iXCOM-CMD GUI available for easy operation (available for MS Windows and Linux)
- Enough computation power on-board available to integrate a sophisticated vehicle trajectory controller or other guidance applications (also by the user itself under RT-LINUX or QNX).
- see iNAT-M200 for our fully environmental protected version.
- iNAT-M200-FLAT is neither ITAR nor export controlled.
Further information:
Datasheet iNAT-M200-FLAT and iNAT-M200-OEM (both dual and single antenna)
Datasheet iNAT-M200/xLN (incl. IP67 enclosure with EMI/EMC protection)
Datasheet iNAT-M200/xLD (incl. IP67 enclosure with EMI/EMC protection)
Datasheet iXCOM-CMD GUI software for operation, visualization and configuration
Report: iNAT-M200/SLN for Trainer Aircrafts (2016)
Report iNAT-M200/SLN on Edge 540 during Red Bull AirRace in Ascot 2016